
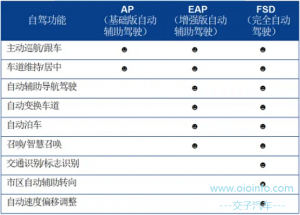
特斯拉的自动驾驶方案包括基础版本自动辅助驾驶(AP:Autopilot)、增强版自动辅助驾驶(EAP)、以及完全自动驾驶(FSD:Full Self-Driving)。
特斯拉FSD 的整体功能
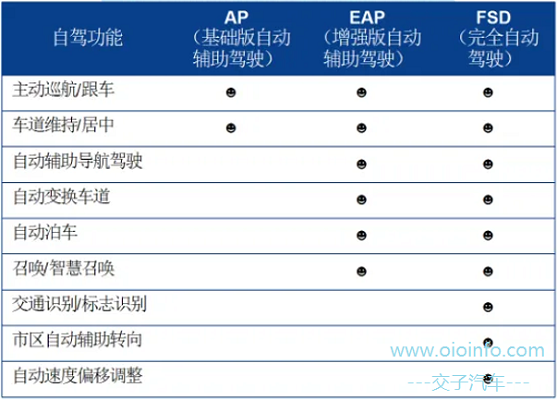
FSD是特斯拉辅助驾驶Autopilot产品组合中功能最完整的产品。
功能上看,特斯拉FSD除辅助驾驶的自动巡航及车道居中外,还可以实现:
- 自动辅助导航驾驶(包括自动驶入和驶出高速公路匝道或立交岔路口、超车);
- 自动辅助变道(包括高速公路上自动辅助变换车道);
- 自动泊车(平行泊车与垂直泊车);
- 智能召唤(在规定场景下,停在车位的车辆会响应召唤、驶出车位并前往车主所在位置);
- 交通标识识别(识别停车标志和交通信号灯,并在车辆接近时自动减速至停止);
- 市区自动辅助转向(检测车道、车辆和障碍物,并操作车辆进行转向);
- 自动速度偏移调整(根据不通的环境和场景,自动调整车辆的行驶速度);
Tesla自动驾驶
FSD 的核心
不同与国内厂商的多传感器融合方案,特斯拉FSD自动驾驶是以摄像头为核心的纯视觉解决方案。
纯视觉方案的最初设计灵感来自对人类视觉的研究:即人眼睛搜集的信息到达视网膜后,经过大脑皮层的多个区域、视觉神经层,最终生成生物视觉,并在脑中生成图像。特斯拉的目标就是通过算法、软件及硬件来设计汽车的视觉皮层,建立像人脑的视觉计算机神经网络系统。
在特斯拉汽车的行驶过程中,车辆通过摄像头收集环境图像信息;特斯拉HW2.0/2.5/3.0版本的硬件都配备了8颗监测不同方位的摄像头,分别为3颗前置摄像头、2颗前侧摄像头、2颗后侧摄像头、1颗后置摄像头。
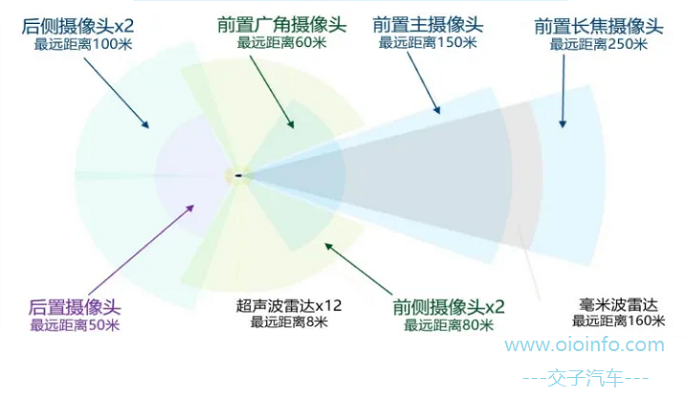
Tesla自动驾驶Camera位置
车辆周围的8颗摄像头通过神经网络生成三维向量空间;向量空间中包含了自动驾驶所需要的信息(如:交通标志、红绿灯、马路线条)。
处理逻辑
由摄像头采集图片信息通过神经网络处理(识别、判断),然后发送信号控制车辆。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END







暂无评论内容