
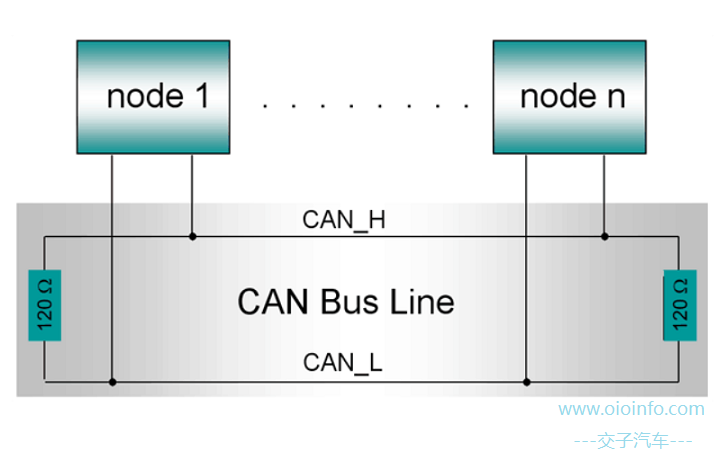
CAN(Controller Area Network,控制器局域网络)是一种广泛使用的车辆总线标准,用于在汽车电子控制单元(ECU)之间进行通信。CAN总线的设计初衷是为了解决现代汽车中众多电子控制单元之间复杂的通信问题,提供一种高效、可靠且成本效益高的数据交换方式。
CAN总线的主要特点包括:
多主站结构:CAN总线上的任何节点都可以在任何时刻主动向网络上其他节点发送信息,而不分主从,通信方式灵活。
基于优先级的仲裁:当多个节点同时发送数据时,CAN总线通过标识符(ID)的优先级进行仲裁,优先级高的数据先发送,避免了总线冲突。
非破坏性总线仲裁技术:在仲裁过程中,优先级较低的节点会主动停止发送数据,而优先级高的节点则继续发送,从而避免了总线上的数据冲突和损坏。
远程数据请求:一个节点可以请求另一个节点发送其数据,这在需要数据同步或更新时非常有用。
错误检测和错误处理:CAN总线具有强大的错误检测能力,能够检测出5种不同类型的错误,并采取相应的错误处理措施,确保通信的可靠性。
通信速率高,距离远:CAN总线的通信速率可以达到1Mbps(在距离较短时),并且理论上可以覆盖的最大距离达到10公里(但实际应用中会受到信号衰减和干扰等因素的影响)。
成本低:由于CAN总线结构简单,硬件和软件实现成本相对较低,因此被广泛应用于各种汽车电子产品中。
CAN总线在汽车中的应用:
CAN总线已成为现代汽车电子系统的核心通信方式之一。它广泛应用于发动机控制、传动系统控制、车身控制、底盘控制、安全系统(如ABS、ESP)以及信息娱乐系统等领域。通过CAN总线,各个电子控制单元可以实时交换信息,实现汽车的智能化控制和优化运行。
随着汽车技术的不断发展,CAN总线也在不断演进。例如,为了满足更高带宽和更多功能的需求,一些汽车制造商开始采用CAN FD(Flexible Data-Rate,灵活数据速率)技术,该技术可以在保持CAN总线原有优点的基础上,提高数据传输速率和数据负载量。









暂无评论内容