
技术开发 第5页
汽车技术开发相关文章~
排序

ProcessOn
ProcessOn提供的图表类型非常丰富,几乎涵盖了项目管理、流程设计、软件开发、教育培训等多个领域所需的图表。以下是一些ProcessOn中常见的具体图表类型:流程图(Flowchart):用于表示一系列...
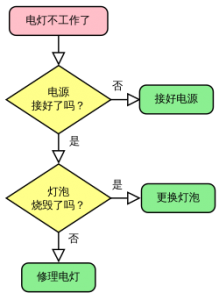
流程图 (flowchart)
应对灯泡不亮的简单流程图流程图,又称程序框图是表示算法、工作流或流程的一种框图表示,它以不同类型的框代表不同种类的步骤,每两个步骤之间则以箭头连接。这种表示方法便于说明解决已知问题...
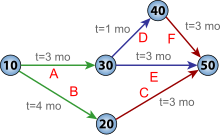
关键路径法(CPM)
关键路径法( Critical path Method, CPM )或关键路径分析( Critical path Analysis, CPA ) 是一种用于安排一组项目活动的算法。 关键路径是通过确定相关活动最长的延伸并测量从开始到结束完...
统一建模语言(UML)
UML的标志统一建模语言(英语:Unified Modeling Language,缩写UML)是非专利的第三代建模和规约语言。UML是一种开放的方法,用于说明、可视化、构建和编写一个正在开发的、面向对象的、软件密...
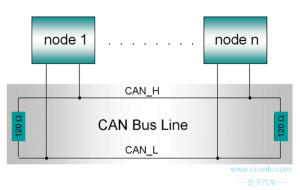
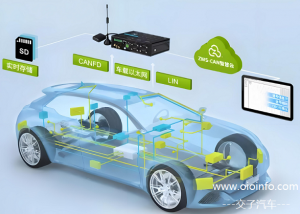
CAN(Controller Area Network,控制器局域网络)
CAN(Controller Area Network,控制器局域网络)是一种广泛使用的车辆总线标准,用于在汽车电子控制单元(ECU)之间进行通信。CAN总线的设计初衷是为了解决现代汽车中众多电子控制单元之间复杂...
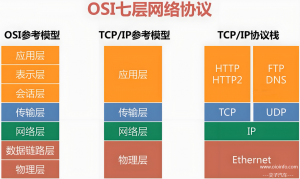
OSI – 7层模型
OSI(Open Systems Interconnection)模型,即开放系统互连参考模型,是一个由国际标准化组织(ISO)提出的网络体系结构框架,旨在促进不同厂商生产的计算机系统之间的互操作性。OSI模型将网络...
TCP和UDP区别
在计算机网络中,传输层协议是确保数据在设备之间可靠传输的关键。传输控制协议(TCP)和用户数据报协议(UDP)是最常用的两种传输层协议。它们在网络通信中的作用不可或缺,但它们的工作原理和...

Polarion ALM
Polarion是一款专为高科技行业设计的综合性应用生命周期管理(ALM)软件解决方案,它集成了需求管理、测试管理、质量管理、文档管理和项目管理等多个关键领域的功能。以下是Polarion的一些基本...
Rational DOORS
Rational DOORS开发商Rational 软件稳定版本9.6.1.11 / 2018-07-09 操作系统操作系统可用巴西葡萄牙语、德语、西班牙语、法语、意大利语、日语、韩语、简体中文、繁体中文、俄语和英语。类型需...

Jira(软件)
JIRA开发商阿特拉斯(Atlassian)初始版本2002 年;稳定版本9.17.1 (2024-07-18;)写于Java操作系统跨平台类型缺陷追踪系统,项目管理软件执照所有权网站 Jira(/ ˈ dʒ iː r ə / ...
