
技术开发 第4页
汽车技术开发相关文章~
排序
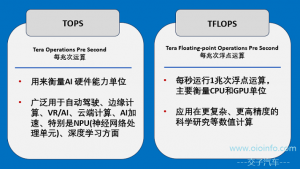
衡量NPU 的算力单位 — TOPS
生成式AI要能真正应用于实际场景中,除了要有强大的算力,也要有足够的硬体支援训练模型和推论。其中训练模型需仰赖大型的硬体算力来进行复杂的运算,而衡量硬体优势的关键就在于「TOPS」(每秒...
关键设计指标
前面我们已经对 AI 的计算模式有了初步的认识,那么这些计算模式具体是如何和 AI 芯片设计结合起来的呢?接下来我们将从 AI 芯片关键设计指标的角度来进一步拓展对 AI 计算体系的思考。计算单位...

HUD(Heads-Up Display)汽车抬头显示
HUD(Heads-Up Display),即抬头显示器(平视显示器),是一种将信息投影到驾驶员前方视野中的设备,使得驾驶员可以在保持视线前方的同时获取必要的信息。HUD的结构原理类似于幻灯片投影。由投...
AI 系统与程序代码关系
模型算法的开发者一般会通过使用 AI 框架提供 Python 等高级语言的 API,来编写对应的人工智能程序,而人工智能程序的底层系统问题被当前层抽象隐藏。到底在每个代码部分具体底层发生了什么?有...

自动驾驶汽车 – Autonomous vehicles
北京首钢园里一台用于穿梭巴士的金龙“阿波龙”无人驾驶小巴自动驾驶汽车(英语:Autonomous vehicles、Self-driving automobile),又称无人驾驶汽车、电脑驾驶车、无人车、机器人车或自驾车,...
TCP和UDP区别
在计算机网络中,传输层协议是确保数据在设备之间可靠传输的关键。传输控制协议(TCP)和用户数据报协议(UDP)是最常用的两种传输层协议。它们在网络通信中的作用不可或缺,但它们的工作原理和...
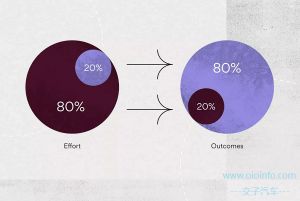
理解帕累托原则(80/20 规则)
帕累托原则 (Pareto principle 也称为 80/20 规则)是一种现象,它指出大约 80% 的结果源于 20% 的原因。本文将深入探讨如何运用这一原则来帮助确定任务和业务工作的优先级。帕累托原则(80/20...

Jira(软件)
JIRA开发商阿特拉斯(Atlassian)初始版本2002 年;稳定版本9.17.1 (2024-07-18;)写于Java操作系统跨平台类型缺陷追踪系统,项目管理软件执照所有权网站 Jira(/ ˈ dʒ iː r ə / ...

Polarion ALM
Polarion是一款专为高科技行业设计的综合性应用生命周期管理(ALM)软件解决方案,它集成了需求管理、测试管理、质量管理、文档管理和项目管理等多个关键领域的功能。以下是Polarion的一些基本...
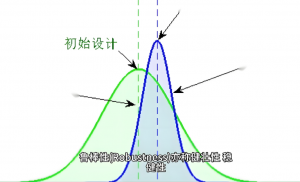
鲁棒性 (robustness)
鲁棒性(英语:robustness,音译),指事物可以抵御外部应力和影响并维持原有状态的自身性质,与汉语中的“稳健性”或“坚韧性”同义。 在不同语境下还可能细指:在计算机中,是指一个计算机系...
